SwarmBots: Using Swarm Robotics for Dynamic Physical Visualizations
Description
Highly interactive data visualizations are key to a better understanding of complex systems, both for domain experts and for the general public. It is long known from educational psychology and the history of science that physical representations can augment cognition and learning, but it is now that emerging technologies offer unprecedented opportunities to build powerful dynamic physical data visualizations [1]. The purpose of this project will be to develop a platform for dynamic physical information visualization. The platform will consist in a collection of small (~3 cm) autonomous physical objects with sensing and planar motion capacities. It will make possible the "physicalization" of a range of data visualizations such as scatterplots, node-link diagrams, star coordinates and bubble charts, as well as physical interfaces. Such physicalizations will be both dynamic and freely manipulable.
This project is a collaboration between Aviz, an Inria Team and Stanford University.
News and Progress
relativedate(2015,10,05); New electronics on the way
 | 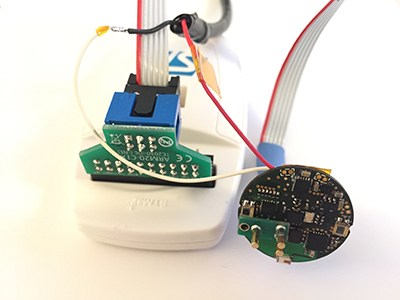 |
| New electronics design coming, now using an ARM microcontroller and all the new functionalities such as position detection or sensing. | |
relativedate(2015,09,01); Positioning comparison
| Comparing different mechanical designs of the robot, to see if the one we chose for space saving concerns is equivalent to a classical design. |
relativedate(2015,08,16); Drive test
| Combining the positioning system with the mobile robot, making it go where we want. |
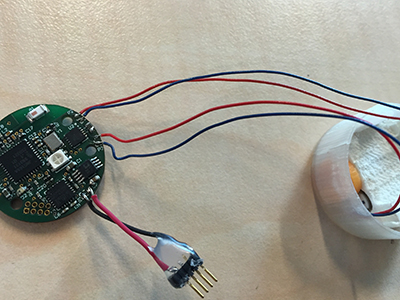
relativedate(2015,05,26); Positioning system
| Trying and experimenting with the optical positioning system. |
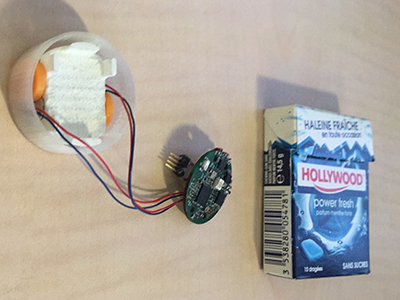
relativedate(2015,04,15); First robot moving
| First robot moving around time we try to get the robot moving on its own using the battery. |
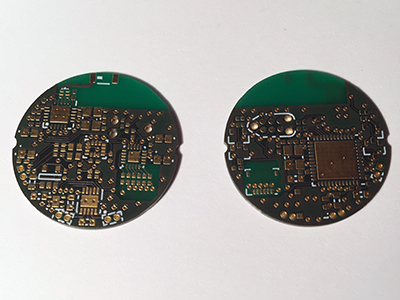
relativedate(2015,03,01); First prototypes
 |  |  |
| First electronics prototypes, including a robot (left and center) and a receiver (right) for wireless communication with a host computer. | ||
References
[1] Jansen, Dragicevic, Isenberg et al. (2015) Opportunities and Challenges for Data Physicalization. ACM CHI 2015 http://dataphys.org/DataPhys.CHI.pdf
Contact
Mathieu Le Goc, Lawrence Kim, Sean Follmer, Pierre Dragicevic, Jean-Daniel Fekete